Écosystème end-of-arm
Tous les robots. Toutes les pinces. Tous les effecteurs terminaux.
La nouvelle plateforme multifonction end-of-arm des deux leaders de la technologie et spécialistes de la manutention que sont Zimmer Group et Schmalz. Dotée d’un large éventail de fonctions et d’interfaces de communication universelles, MATCH est compatible avec tous les robots de construction légère courants du marché. C’est un système idéal pour les cobots et les robots conventionnels à 6 axes.
MODULES DE ROBOT ET PINCES MATCH Moteur de recherche pour produits de robotique
VOS AVANTAGES
- Un système pour les robots de construction légère, les cobots et les robots conventionnels
- Compatibilité et flexibilité : les principales technologies de manutention (préhension à vide ou mécanique) réunies
- Longue durée de vie, même en fonctionnement continu automatisé
- Écosystème numérique innovant
- Grande diversité d’effecteurs terminaux
- Changement manuel grâce à la fonction Easy-Click
- Changement automatisé dans le dispositif
- Recommandé par ABB, l’un des principaux fabricants de robots
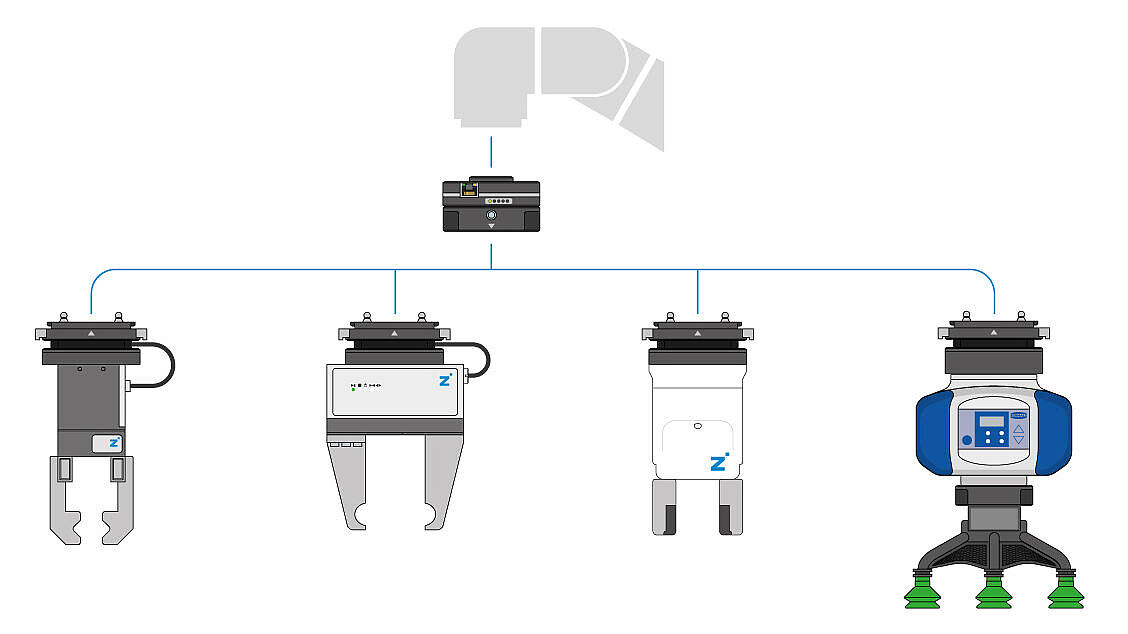
STANDARDISATION DE L’INTERFACE ROBOT
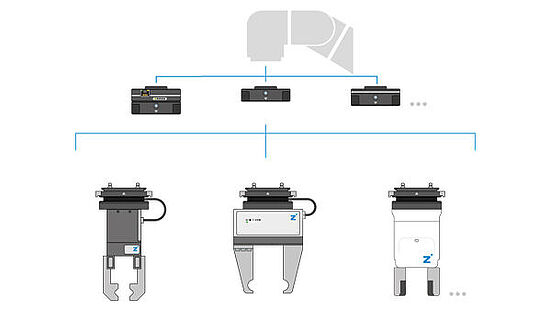
La série MATCH offre un potentiel de standardisation unique : le module de robot MATCH peut être monté sur les types de robots les plus courants et sert de connecteur pour l’ensemble des effecteurs terminaux compatibles MATCH. Ainsi uniformisées, les brides de raccordement des robots offrent un niveau élevé de flexibilité dans le choix des applications. Qu’il s’agisse de pinces ou de ventouses, les effecteurs terminaux installés peuvent être changés simplement par système d’encliquetage, manuellement ou automatiquement. Les solutions normalisées et clé en main garantissent une disponibilité maximale d’installation.
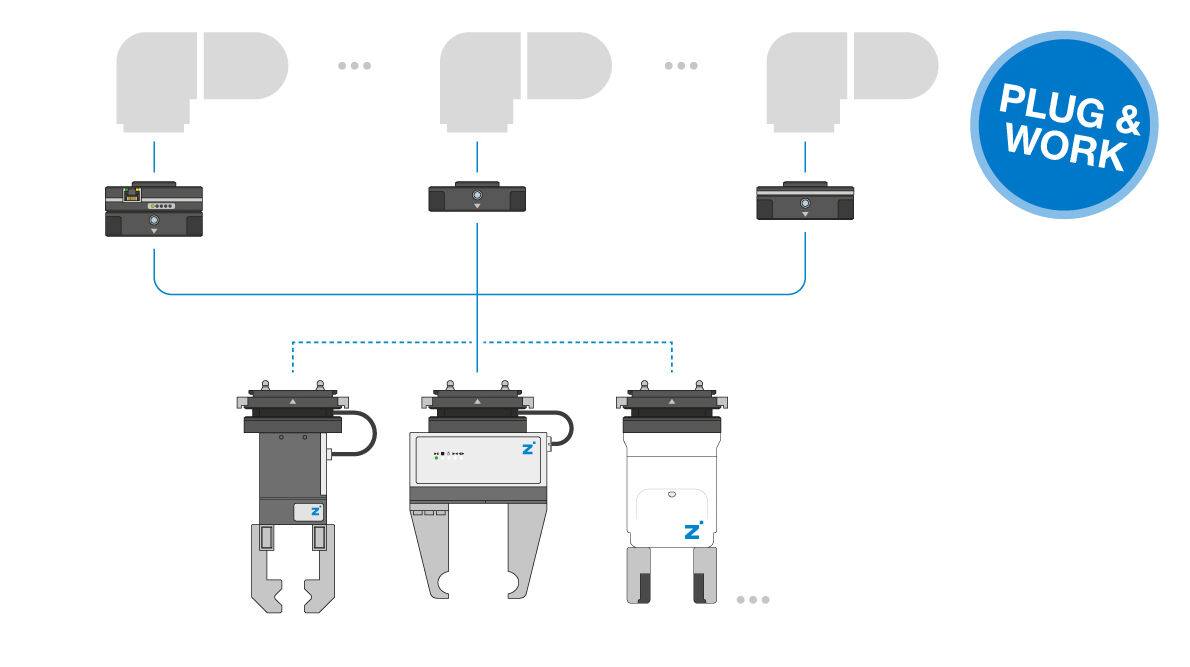
PLUG & WORK - SIMPLIFICATION DE L’INTERFACE DE COMMUNICATION
En plus d’une liaison mécanique uniforme entre le bras robotisé et l’effecteur terminal, MATCH apporte également une simplification dans la communication entre les machines. Les modules de robot MATCH sont disponibles dans les variantes Digital I/O, IO-Link, ou sont livrés directement avec leur propre Smart Communication Module. MATCH fournit les paramètres de communication requis pour interconnecter par Plug&Work les robots de différentes marques avec le système MATCH.

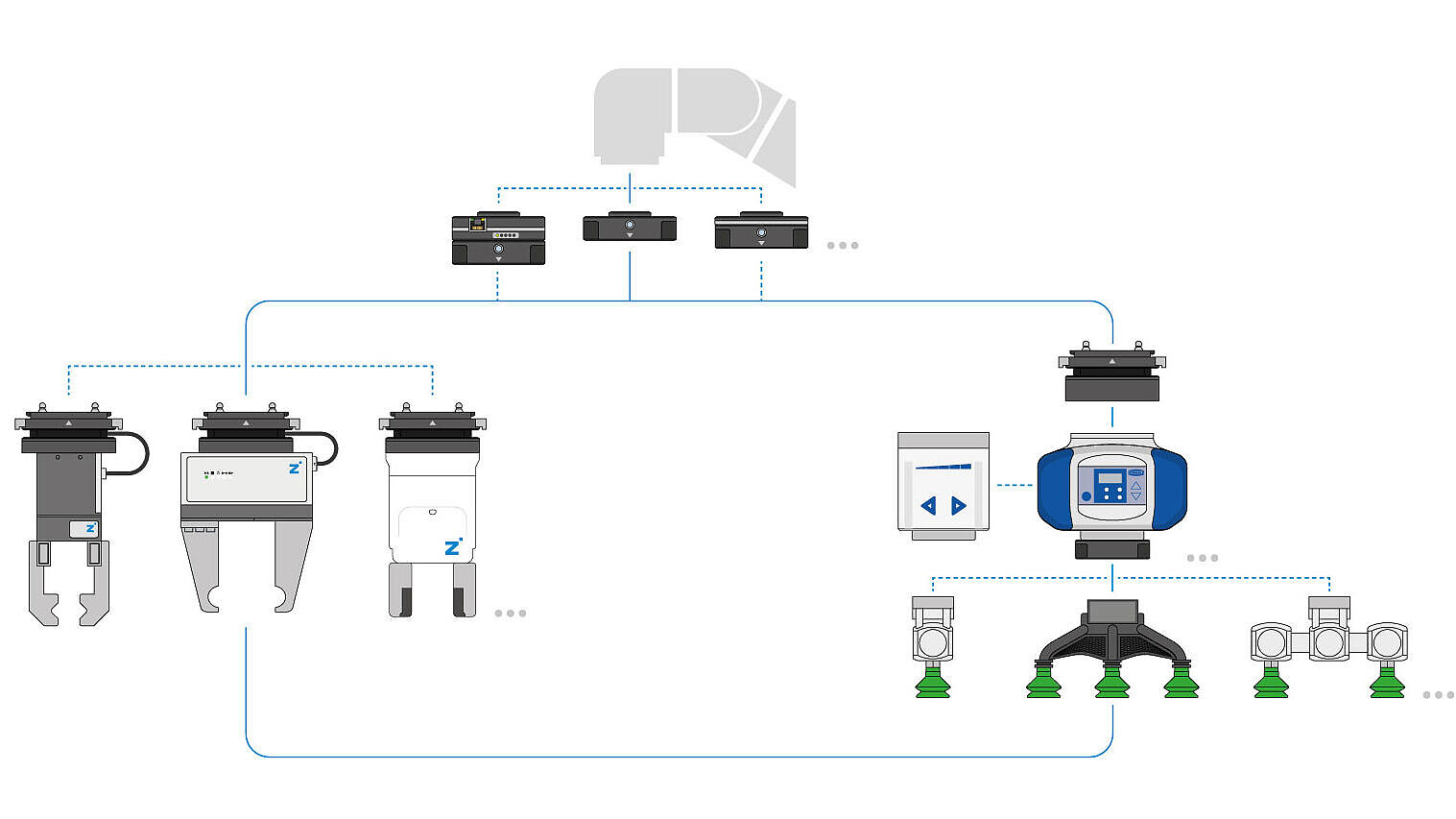
ECOSYSTÈME MATCH - LARGE CHOIX D’EFFECTEURS TERMINAUX
Le portefeuille MATCH comprend un large choix de pinces de Zimmer Group. Celui-ci ne se limite pas à l’utilisation dans la robotique de construction légère et la coopération homme-robot, mais est également adapté à l’utilisation dans les robots industriels et les robots gros porteurs. Outre les pinces de Zimmer Group, les effecteurs terminaux de l’entreprise Schmalz sont également compatibles avec le système MATCH. L’écosystème MATCH est non seulement constitué des composants physiques, mais aussi de différentes solutions logicielles : une application, adaptée au fabricant de robot concerné, permet la commande directe et la surveillance des fonctions.
APPLICATIONS ROBOTISÉES COMPLEXES AVEC CHANGEMENT AUTOMATIQUE
Concernant l’avenir de la production automatisée, on prévoit qu’on atteindra une plus grande efficacité en utilisant de manière flexible un robot, c’est-à-dire qu’un seul et même robot peut effectuer plusieurs tâches différentes sur une pièce à usiner, grâce au changement automatique de l’effecteur terminal. Par ailleurs, la standardisation implique une simplification pour les exploitants et les intégrateurs.
En plus du changement automatique de l’effecteur terminal, la gamme MATCH permet l’utilisation de la même ventouse ou de la même pince par différents types et systèmes de robots. Les modules de robot MATCH constituent dans ce cas des composants clés, car ils sont disponibles pour de nombreux robots des fabricants les plus courants.
MATCH



Composants
0 Bride de robot
1 Module de communication
2 Module de robot
3 Pince MATCH
4 Logiciel
Avec ses interfaces normalisées et spécifiques au robot, la série MATCH permet une configuration rapide et flexible de l’application robotique. Sa conception simple offre par ailleurs un niveau élevé de flexibilité pour réaliser divers travaux à partir d’un ou plusieurs robots.
Conventionnel




Composants
0 Bride de robot
1 Module de communication
2 Adaptation à la bride de robot
3 Niveau multifonction
4 Changeur d’outil
5 Adaptation à l’effecteur terminal
6 Effecteur terminal
Lors de la configuration d’une cellule de robot avec des composants conventionnels, il est possible de choisir dans une large gamme de produits les composants parfaitement adaptés à l’application spécifique du client.

EXEMPLE D’ÉQUIPEMENT DE MACHINE AUTOMATISÉ POUR DES QUANTITÉS DE PIÈCES MOINDRES
Avec un vaste ÉCOSYSTÈME composé de pinces de course normale à grande course ainsi que de composants d’aspiration et de vide, adapté de manière très flexible à chaque pièce à usiner, le chargement de la machine grâce à des temps d’adaptation rapides et une maintenance simplifiée sont rendus possibles grâce aux quantités de pièces moindres.
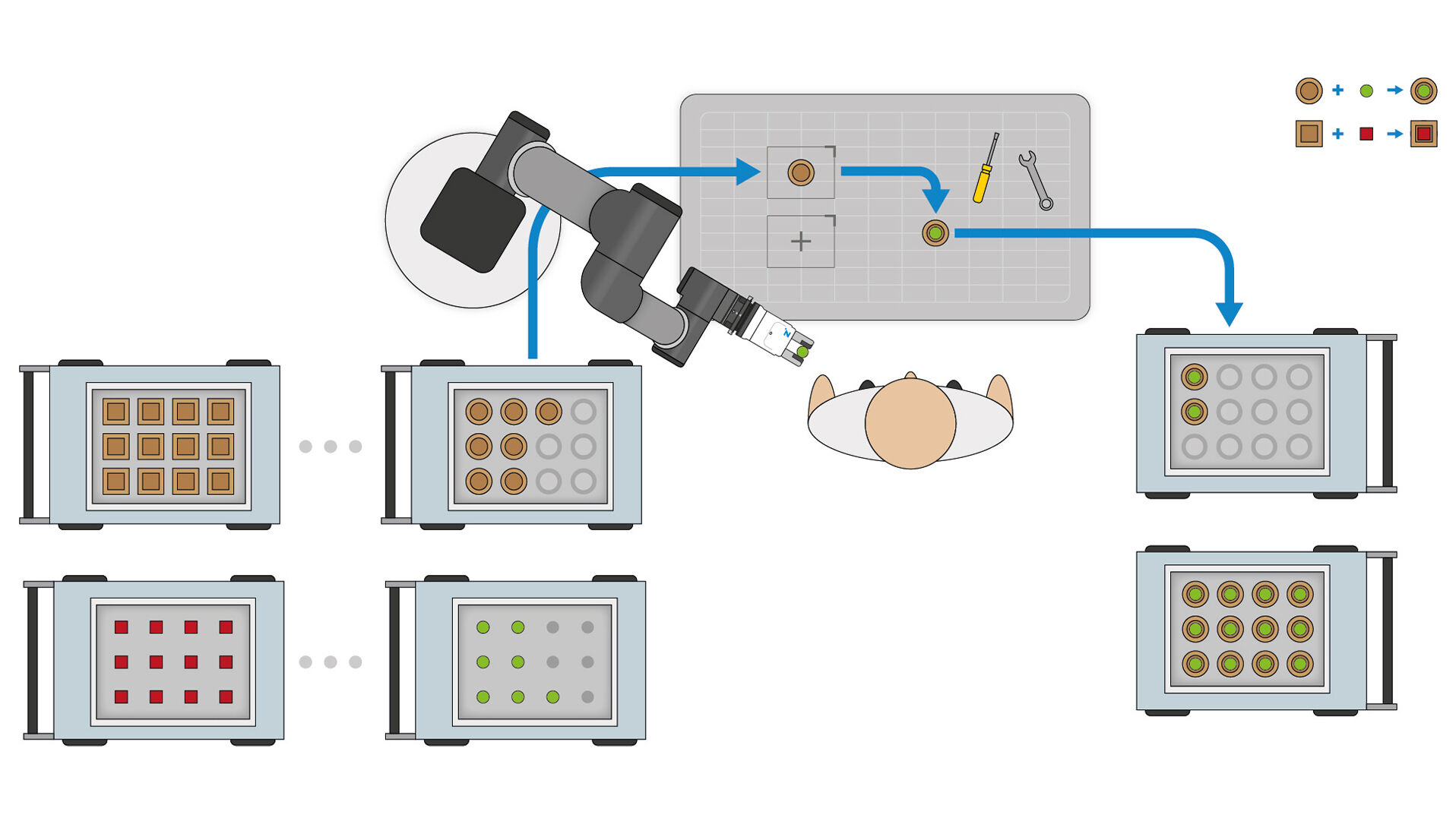
EXEMPLE DE MONTAGE DE PIÈCES COLLABORATIF POUR DES QUANTITÉS DE PIÈCES MOINDRES
Une assistance efficace grâce au robot collaboratif et à l’effecteur terminal, sans aucune connaissance en programmation. Allie une configuration très simple et des temps d’adaptation très rapides.
MATCH sur les cobots et les robots industriels d’ABB
L’intégration simple et flexible des effecteurs terminaux séduit les fabricants de robots du monde entier. Par exemple, ABB recommande l’écosystème MATCH, y compris les pinces collaboratives, pour ses robots. Dans ce film, nous vous montrons comment le module de robot vous permet d’être paré pour presque toutes les applications.
MATCH for cobots and industrial robots from ABB
![[Translate to Französisch:]](/fileadmin/_processed_/4/9/csm_ZIM_BIL_PRO_MATCH-BAHNHOF-1__SALL__AQU__V1_bcc011b3af.jpg "[Translate to Französisch:]")

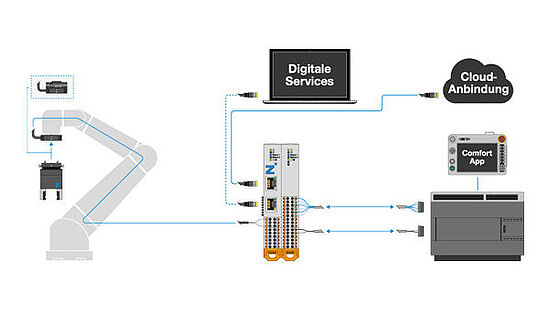


CONTRÔLE INTÉGRAL DU PROCESSUS POUR CHAQUE APPLICATION
MATCH vvous garantit une assistance complète et un contrôle du processus, de la mise en service jusqu’à la surveillance du processus en passant par le fonctionnement. Les services numériques tels que les fonctions Human Machine Interface pour la configuration et l’utilisation, la collecte de données de processus et de diagnostic, l’évaluation et la visualisation ainsi que la connexion cloud offrent une valeur ajoutée à toutes les phases du cycle de vie du produit.
