
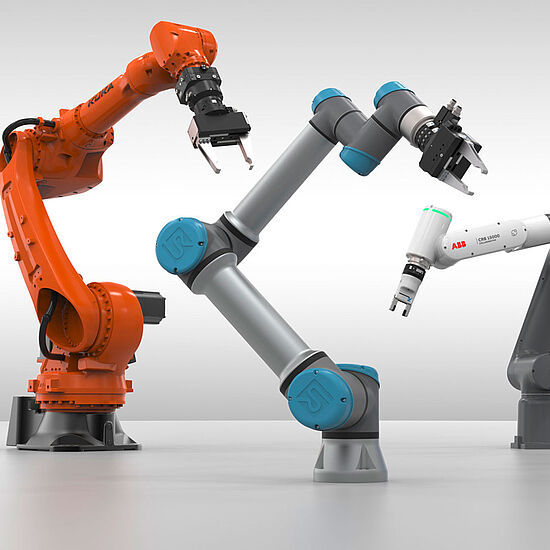
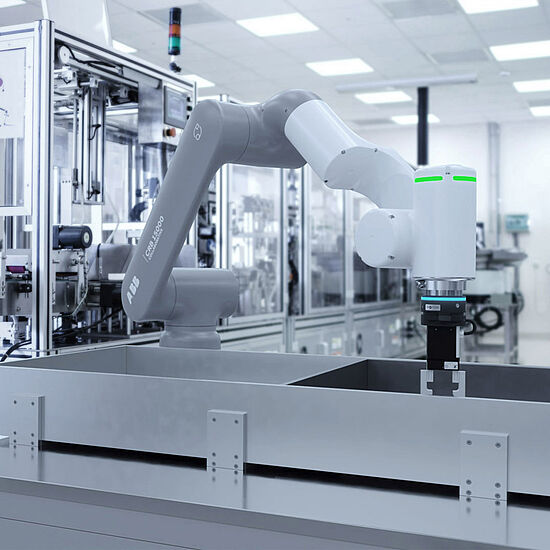
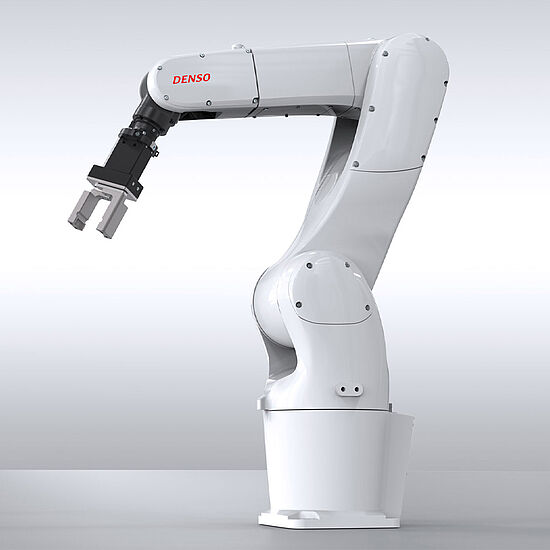
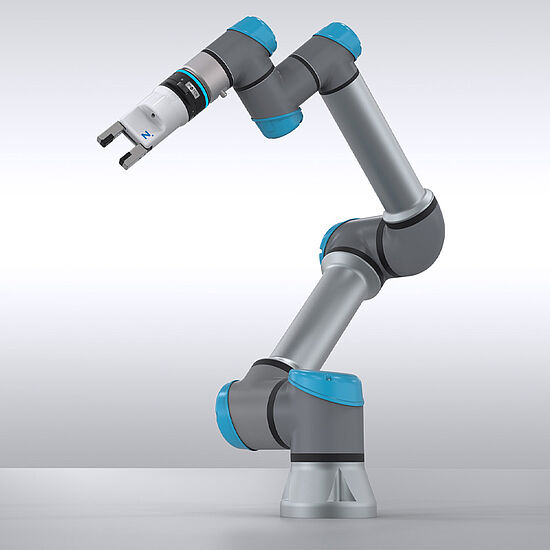
Tecnología para robots
Nuestra gama incluye un amplio espectro tecnológico para robots, desde cambiadores de herramienta y anticolisiones hasta compensadores de ejes para la robótica industrial y de peso ligero.








Componentes de la tecnología para robots






1. Werkzeugwechsler

- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg
Referencia del componente
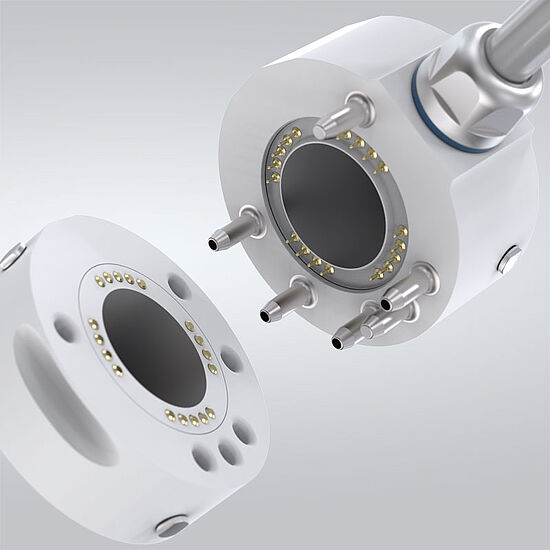
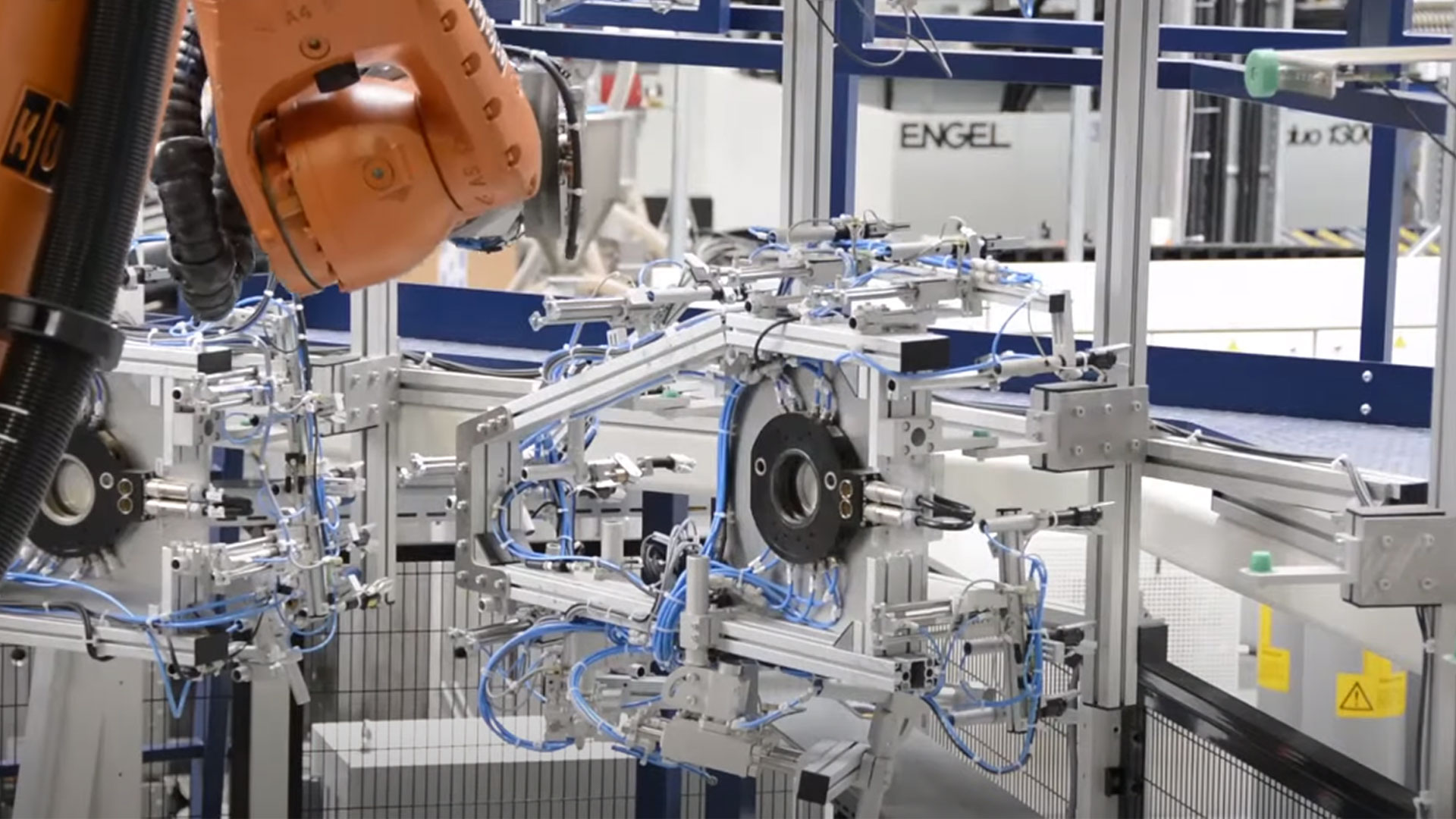
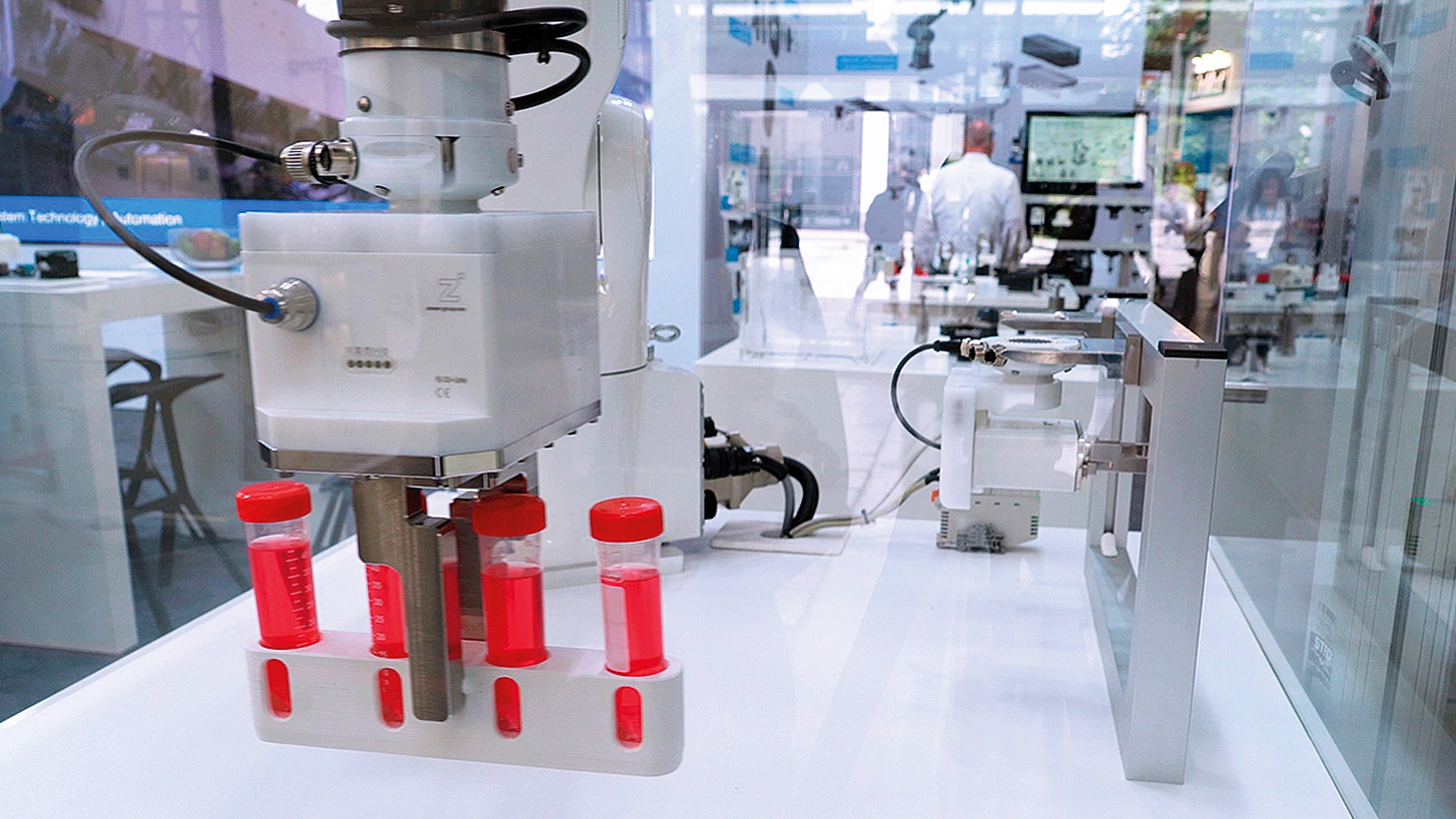
Accesorios para robots - Cambiador de herramientas WWR en funcionamiento


Cambiadores de herramienta
Serie FWR

- Cambio de herramienta automatizado sin accionamiento externo
- Cambio de herramienta manual
- Transmisión de medios opcional
LWR-HRC-02
- Pinzas colaborativas con certificación DGUV
- Servoaccionamiento con controlador integrado
- Versión sensible
- Control IO-Link
- Uso en combinación con piezas fijas LWR (IO-Link/RS485)
- Óptimo para aplicaciones de piezas más grandes así como de diferentes dimensiones gracias a la servotecnología
1. Werkzeugwechsler

- Cambio de herramienta automatizado sin accionamiento externo
- Cambio de herramienta manual
- Transmisión de medios opcional
2. LWR-HRC-02
- Pinzas colaborativas con certificación DGUV
- Servoaccionamiento con controlador integrado
- Versión sensible
- Control IO-Link
- Uso en combinación con piezas fijas LWR (IO-Link/RS485)
- Óptimo para aplicaciones de piezas más grandes así como de diferentes dimensiones gracias a la servotecnología
Pinzas paralelas de gran recorrido
Serie GEH6000IL


Pinzas paralelas
Serie GPP5000

- Guía lineal de acero: un concepto de guía superior
- Estanca y protegida contra la corrosión: la pinza universal
- Guía lineal de aluminio: la alternativa
Unidades de giro
Serie SF-C

- Amortiguación de la posición final a través de amortiguadores hidráulicos con tecnología de ranura helicoidal
- Par de giro de hasta 130 Nm
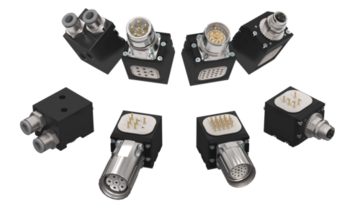
Distribuidores de giro
Serie DVR

- Adecuado para cargas bajas y altas
- Brida de conexión según EN ISO 9409-1: TK40... TK160
- Con 4...8 pasillos neumáticos
- Con 4...12 pasajes eléctricos
1. Pinzas paralelas

- Guía lineal de acero: un concepto de guía superior
- Estanca y protegida contra la corrosión: la pinza universal
- Guía lineal de aluminio: la alternativa
2. Módulos orientables y de giro

- Amortiguación de la posición final a través de amortiguadores hidráulicos con tecnología de ranura helicoidal
- Par de giro de hasta 130 Nm
3. Distribuidores de giro

- Adecuado para cargas bajas y altas
- Brida de conexión según EN ISO 9409-1: TK40... TK160
- Con 4...8 pasillos neumáticos
- Con 4...12 pasajes eléctricos
Cambiadores de herramienta
Serie WWR

- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg
1. Werkzeugwechsler
- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg

Pinzas paralelas
Serie GEP2000

- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link
1. Pinzas paralelas

- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link

Pinzas paralelas
Serie GEP2000
- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link
Cambiadores de herramienta
Serie WWR
- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg
1. Pinzas paralelas
- Gran recorrido con mínimo espacio constructivo
- El accionamiento más sencillo
- Posicionamiento mediante IO-Link
2. Werkzeugwechsler
- Brida de sujeción a robot según circulo primitivo EN ISO 9409-1
- Para un peso de manipulación de hasta 300 kg


Catálogos, folletos y flyers

Catalog
Tecnología de manipulación 2 / Accesorios para robots
español
19 MB,
PDF
Descargar
