Referencia del sistema
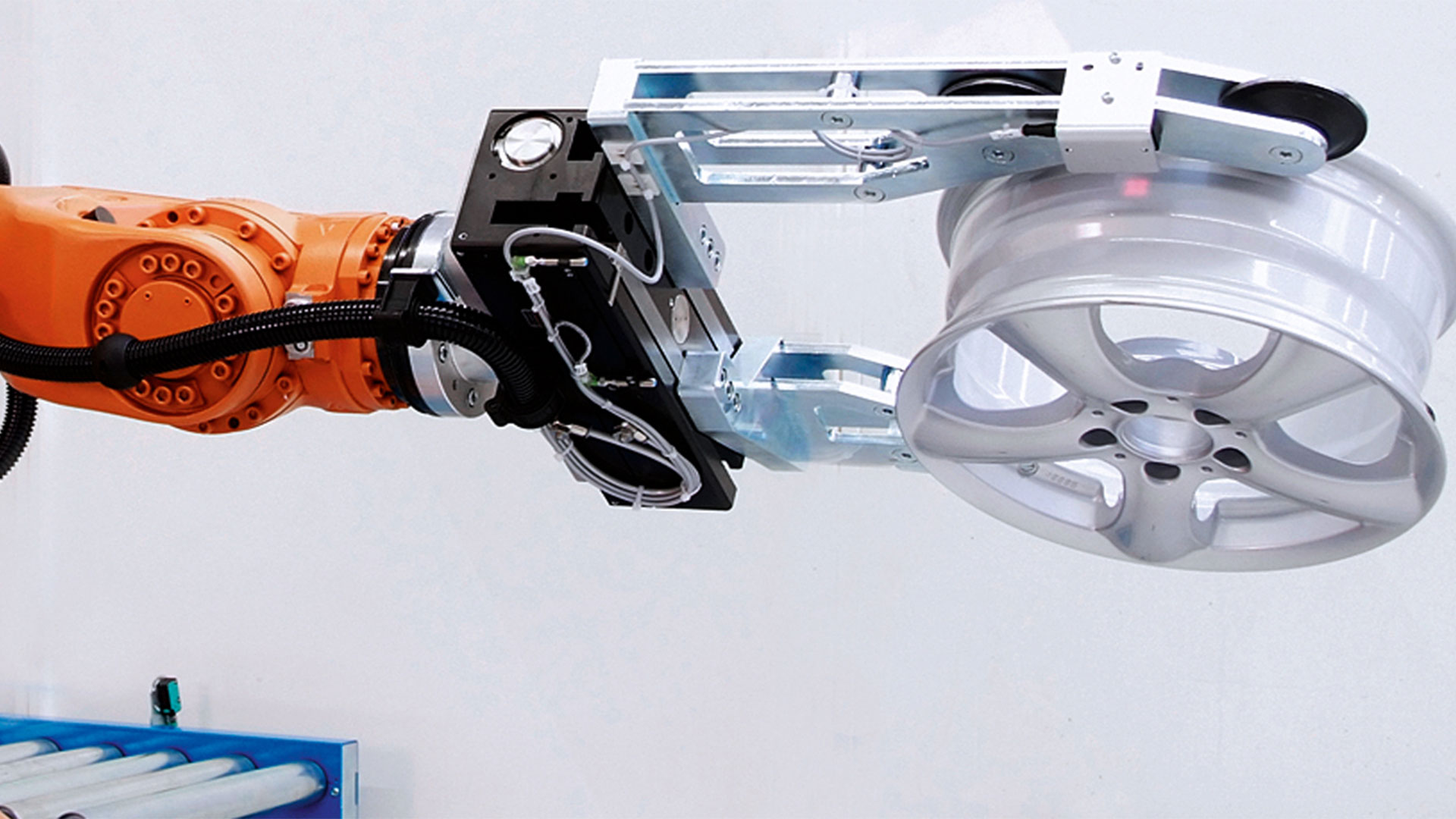
Pinza para llantas
Pinza | Soluciones de sistemas | Movilidad | Automóvil | Neumáticos, llantas y ruedas
Pinzas paralelas de gran recorrido
Serie GH6000

- Accionamiento directo sincronizado por piñón
- Guía de ranura en T para una absorción de elevadas fuerzas y momentos
1. Pinzas paralelas

- Accionamiento directo sincronizado por piñón
- Guía de ranura en T para una absorción de elevadas fuerzas y momentos
Reto
Al manipular llantas tenía que cubrirse un espectro de piezas muy grande (13-22 pulgadas) - incluida una reserva para futuros tamaños de componentes. Además, la pinza tenía que haberse diseñado con optimización del peso para lograr un tamaño del robot pequeño y con ello mantener los costes bajos.
Solución
Como base de la solución se utilizó una pinza de carrera grande robusta de la serie GH6000 en combinación con un juego de mordazas con optimización del peso.
Aspectos destacados y datos técnicos
 IP40
IP40 Neumático
Neumático Agarre exterior
Agarre exterior
Datos técnicos
| Tipo de accionamiento | PNEU |
| Fuerza de agarre máx. | 3300 [N] |
| Concepto de agarre | KRAFT |
| Autorretención | DRUCKSICHER |
| Carrera máx. | 300 [mm] |
| Clase IP | IP40 |
| Peso del sistema | 25 [kg] |
| Peso máx. de la pieza de trabajo | 20 [kg] |
| Temperatura de la pieza de trabajo máx. | 80 [°C] |
Componentes estándar montados