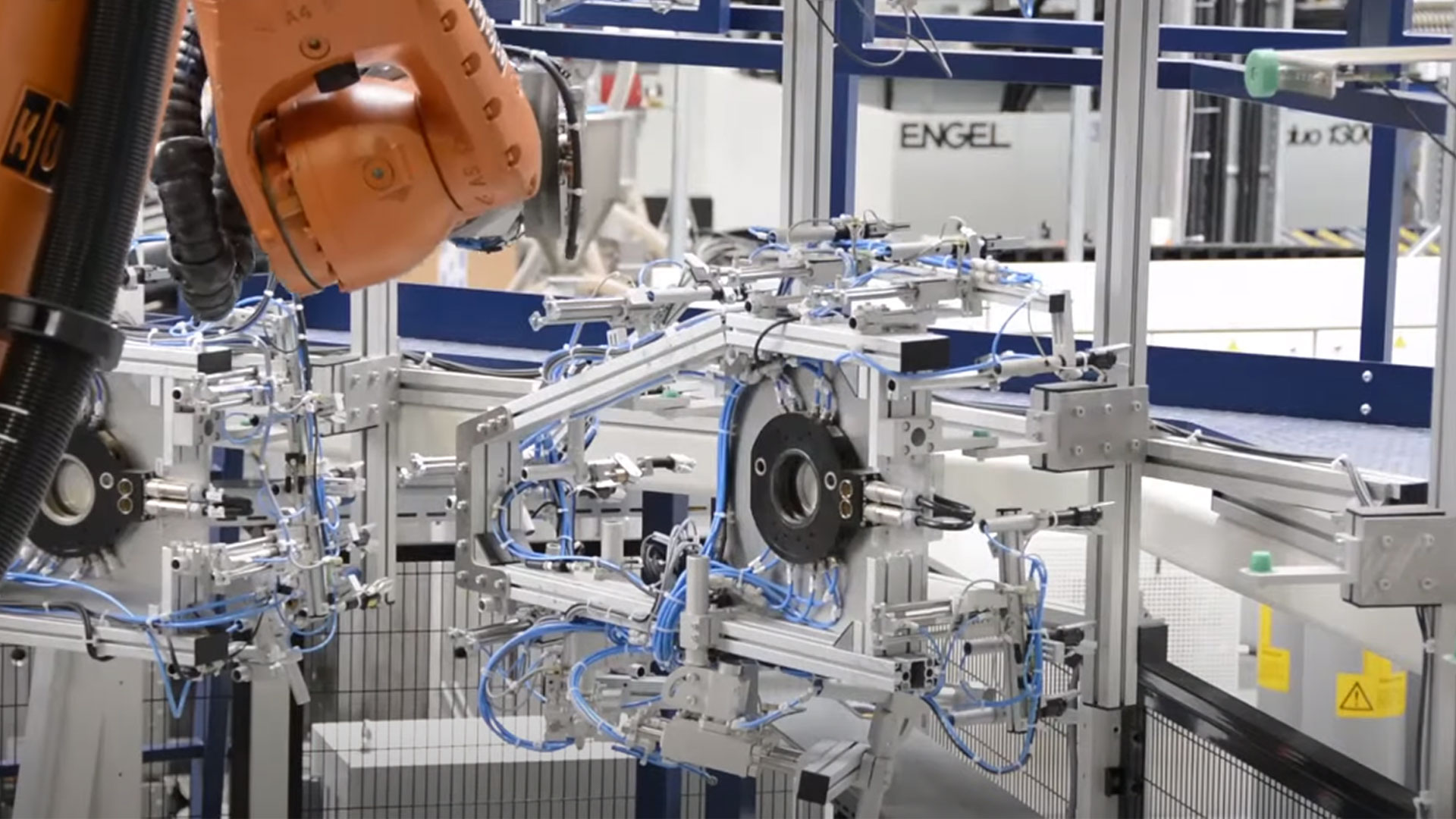
快换装置
我们的快换装置可为您提供完美的解决方案,最大限度地提高生产过程的灵活性和生产率。这些专为高精度和耐用性而开发的解决方案能够快速安全地更换各种工具。从紧凑型系统到适合于工业应用的复杂型号,我们为您提供满足您应用要求的快换装置。了解我们海量的创新产品如何助您提高生产效率和竞争力。


技术亮点:快换装置
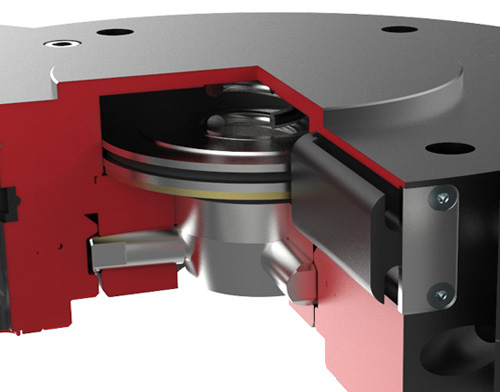
- “在压力下降时安全保持”弹簧蓄能器与机械式自锁装置组合而成的冗余系统,确保您的机器安全
- “极为扁平的设计”这种设计可将机器人的力矩载荷降至最低,支持更小、成本更低廉的安装尺寸
- “各种介质传输系统”无论您要传输哪种介质,我们都能搞定,还能针对您的要求找到合适的解决方案
多样化
您想要打造个性化的机器并自由传输介质吗?我们有多种标准化能源元件可供您选用。我们也乐意为您开发量身定制的解决方案。
标准化
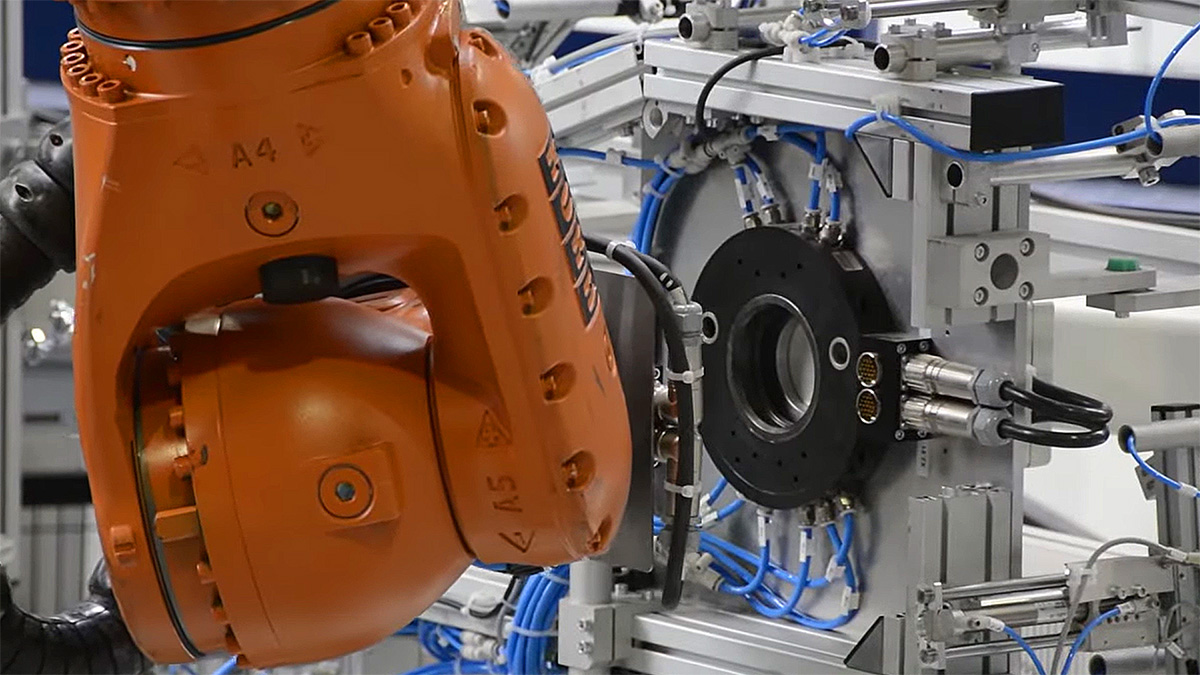
结构高度会降低机器人的承载能力。因此,我们的机器人组件极其扁平,无需额外的转接板即可将其相互组合。可通过符合 EN ISO 9409-1 标准的装配法兰直接安装到机器人上。
安全
对我们而言,生产安全是第一要务。因此,我们的快换装置配有内置的传感器、用于保持力的弹簧和极其牢固耐用的线接触锁定螺栓,能为您带来极高的安全性。
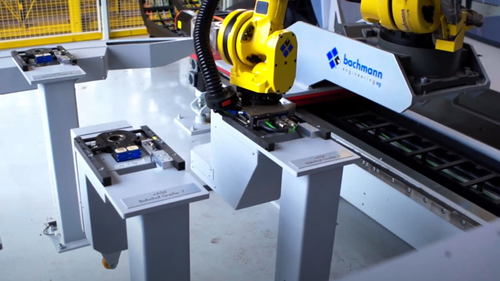
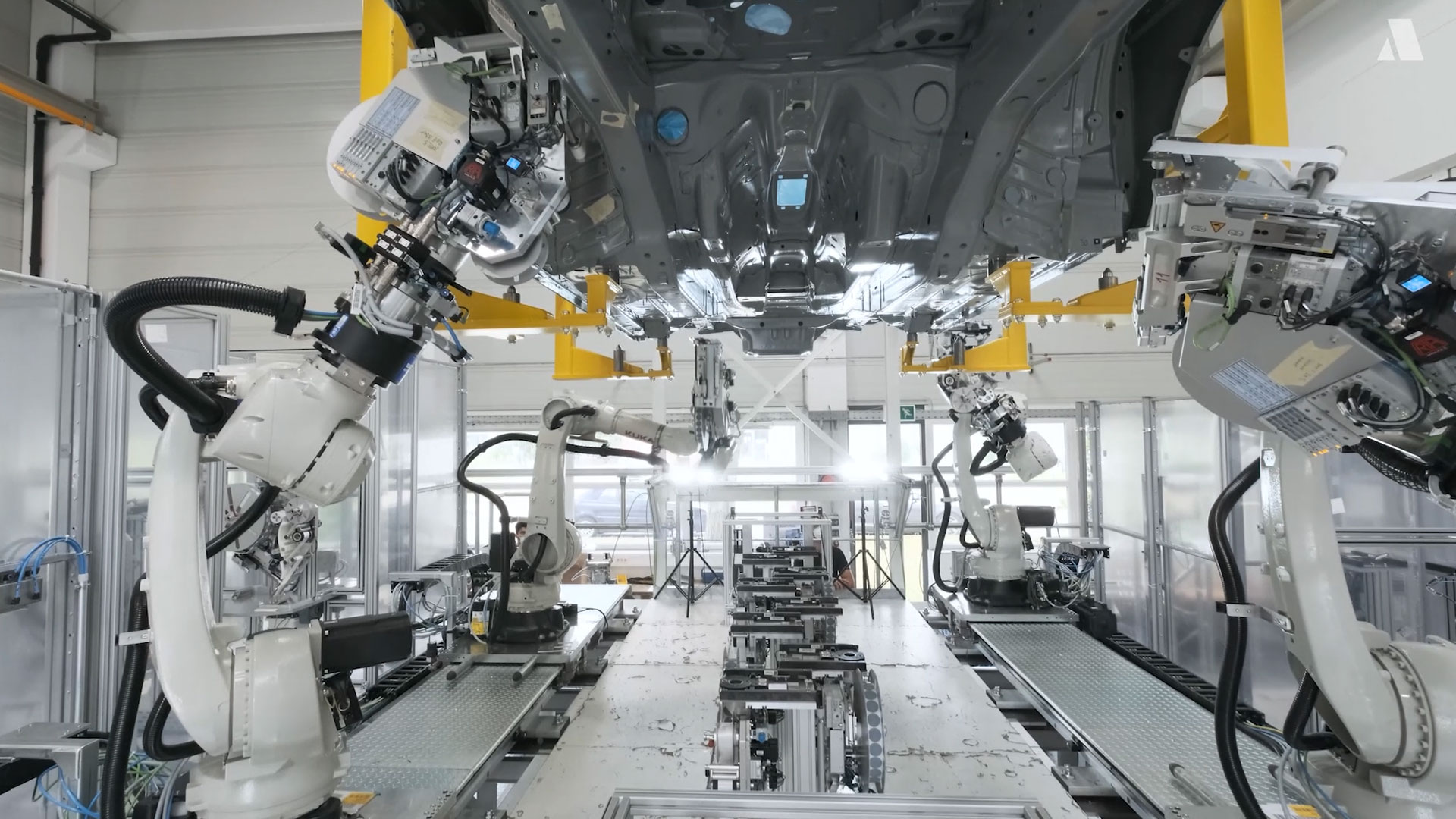
焦点:快换装置的重要性
快换装置在机器人技术领域起着决定性作用。在此了解更多背景信息,以及为何不应低估快换装置作为全自动化关键要素的作用。
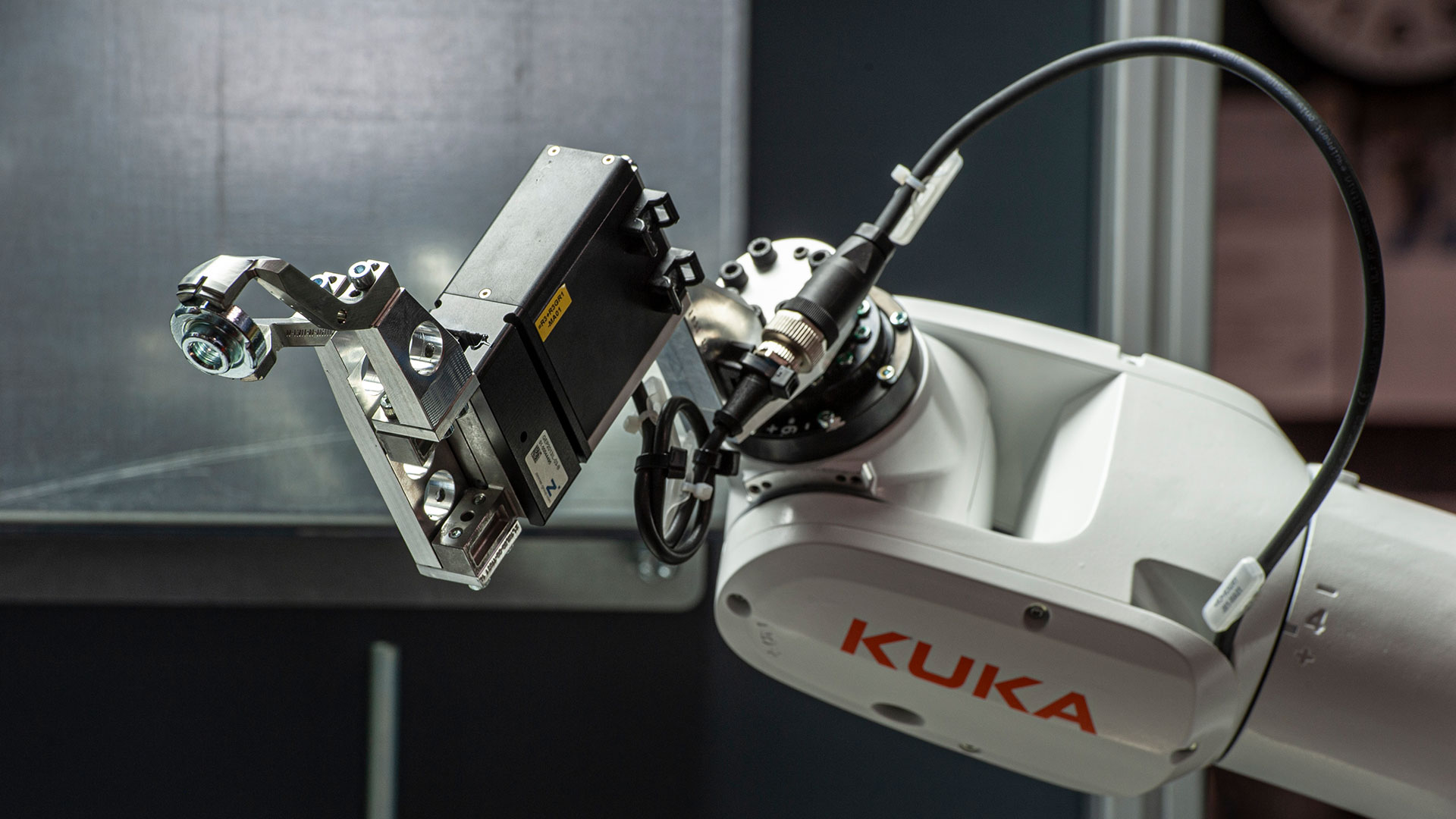
2指平行抓手
GEP2000 系列

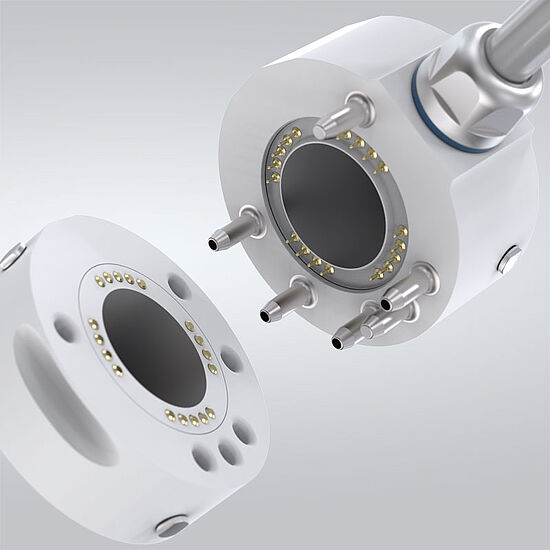
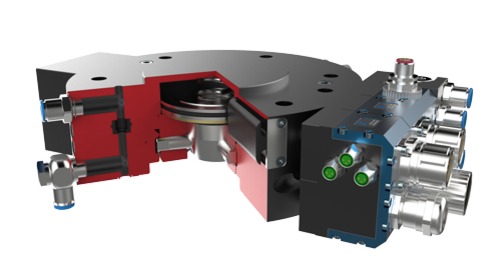
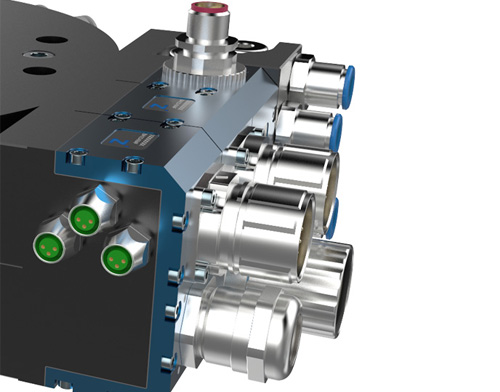
工具快换
WWR 系列

- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量

2. Werkzeugwechsler

- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量
工具快换
WWR 系列
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量
1. Werkzeugwechsler
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量

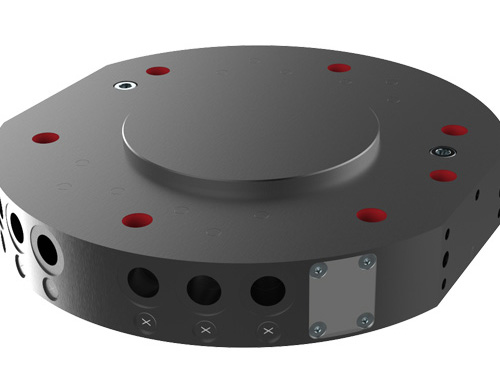
工具快换
FWR 系列

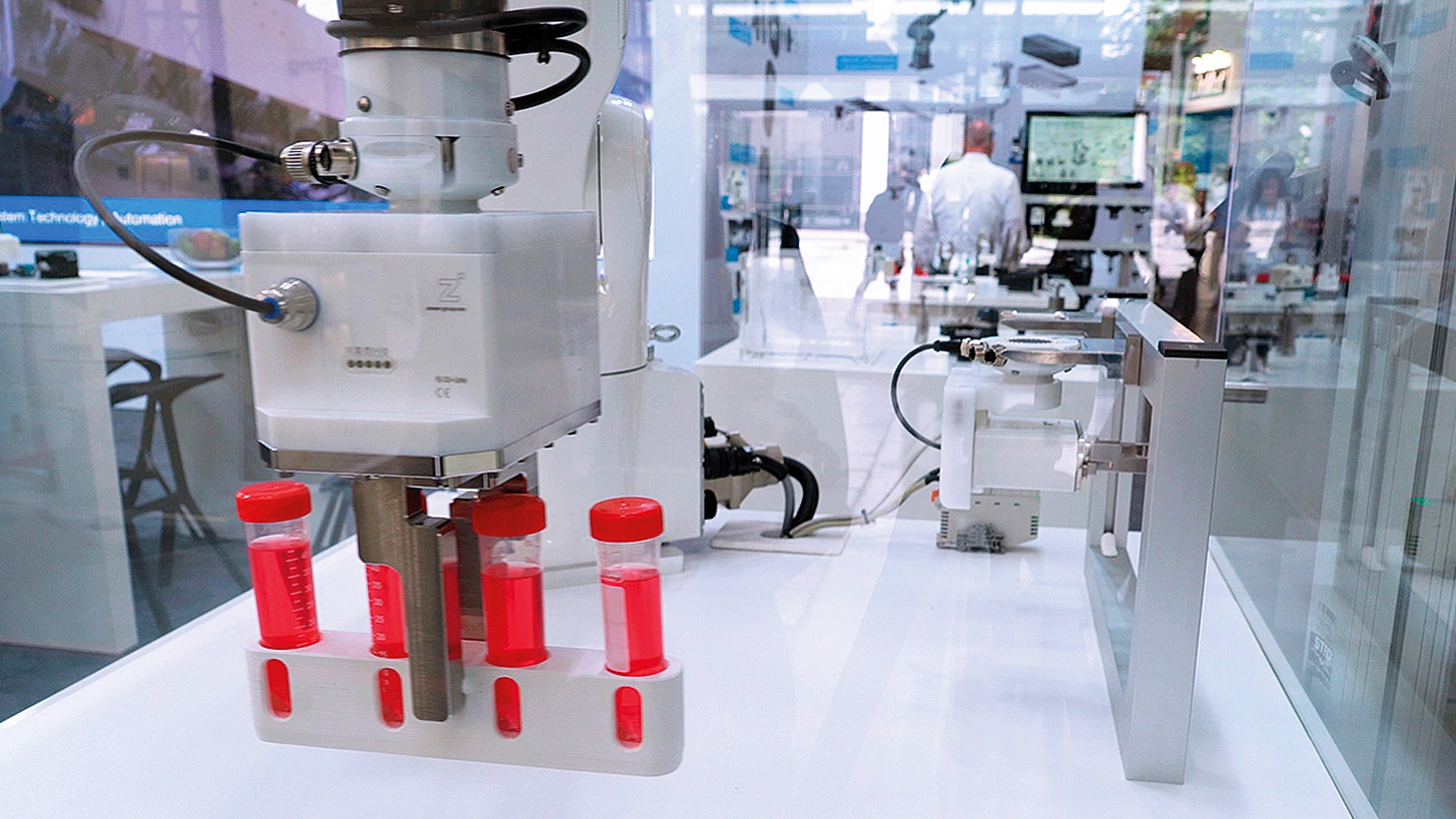
LWR-HRC-02
- DGUV认证的协作抓手
- 带集成控制器的伺服电机
- 敏感版本
- IO-Link控制
- 与LWR固定部件(IO-Link/RS485)结合使用。
- 由于采用了伺服技术,最适合应用于大型工件和不同尺寸的工件。

2. LWR-HRC-02
- DGUV认证的协作抓手
- 带集成控制器的伺服电机
- 敏感版本
- IO-Link控制
- 与LWR固定部件(IO-Link/RS485)结合使用。
- 由于采用了伺服技术,最适合应用于大型工件和不同尺寸的工件。
工具快换
WWR 系列
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量
1. Werkzeugwechsler
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量

工具快换
WWR 系列
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量
1. Werkzeugwechsler
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量


工具快换
WWR 系列
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量
1. Werkzeugwechsler
- 机器人法兰带部分安装圈符合EN ISO 9409-1标准
- 高负载性能可负载300 Kg以下重量


