Anticolisiones
Serie CRR

- Sensibilidad de activación ajustable
Mediante el control de la presión de aire puede ajustar la sensibilidad óptima para su aplicación. - Detectores integrados
En caso de colisión, el sensor integrado envía una señal al control para activar una parada de emergencia. - Retorno automatizado
Tras una parada de emergencia, puede hacer retroceder la anticolisión desde una distancia segura. Esto resulta especialmente ventajoso si no se desea acceder a la instalación, no es posible de forma segura o resulta difícil.
Tamaño constructivo: CRR40 | ||||
| Referencia | Brida de conexión según EN ISO 9409-1 | Desviación eje Z | Precisión de repetición axial +/- | |
|---|---|---|---|---|
| CRR40N-A | TK 40 | 8 [mm] | 0.01 [mm] | |
Tamaño constructivo: CRR50 | ||||
| Referencia | Brida de conexión según EN ISO 9409-1 | Desviación eje Z | Precisión de repetición axial +/- | |
| CRR50N-A | TK 50 | 12 [mm] | 0.01 [mm] | |
Tamaño constructivo: CRR63 | ||||
| Referencia | Brida de conexión según EN ISO 9409-1 | Desviación eje Z | Precisión de repetición axial +/- | |
| CRR63N-A | TK 63 | 15 [mm] | 0.01 [mm] | |
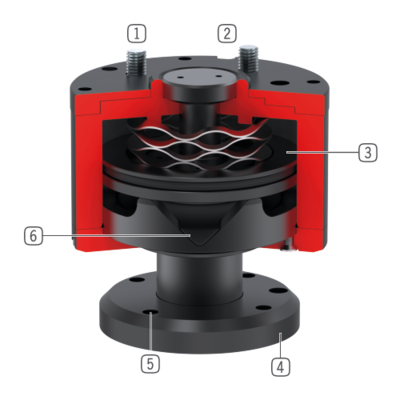
- Brida de unión para robot
circulo primitivo según EN ISO 9409-1 - Detección de la posición del émbolo
el sensor emite una señal que puede ser interpretada como la detección de sobrecarga detector magnético incluido en el suministro - Accionamiento
cilindro neumático de simple efecto la respuesta es sensible según la presión de trabajo con muelle integrado - Detección de sobrecarga
en dirección Z inclinación en dirección horizontal torsión respecto al eje Z - Brida de unión
circulo primitivo según EN ISO 9409-1 - Retorno
mediante el émbolo, la brida de unión se desplaza a su posición de partida