System obsługi steków

Zadanie
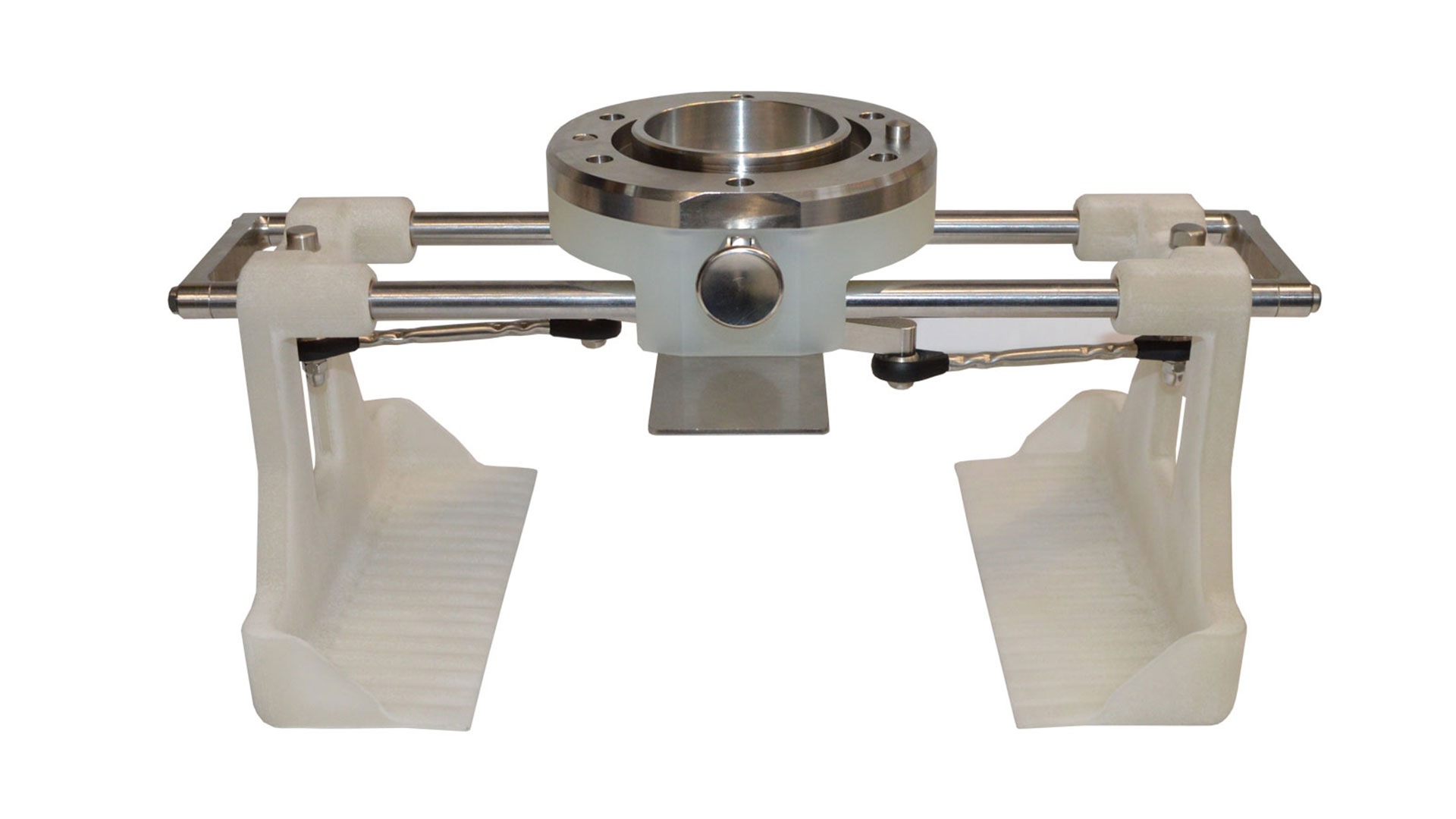
Przenoszenie surowych towarów z przenośnika taśmowego do opakowania. Ponieważ sam chwytak nie ma własnego napędu, jest sterowany za pomocą osi obrotowej zintegrowanej z Flexpicker.
Rozwiązanie
Rozwiązanie polega na zaprojektowaniu komponentów kompatybilnych z żywnością. Ponadto stworzono bezpośredni interfejs osi obrotowej robota do kinematyki chwytaka.
Najważniejsze informacje i dane techniczne
 Napęd serwomotoru AC
Napęd serwomotoru AC Chwyt od zewnątrz
Chwyt od zewnątrz
Dane techniczne
| Rodzaj napędu | elektr. |
| Wizualizacja graficzna | FORM |
| Skok maks. | 177 [mm] |
| Waga systemu | 2.5 [kg] |