Sistema de manipulación de filetes

Reto
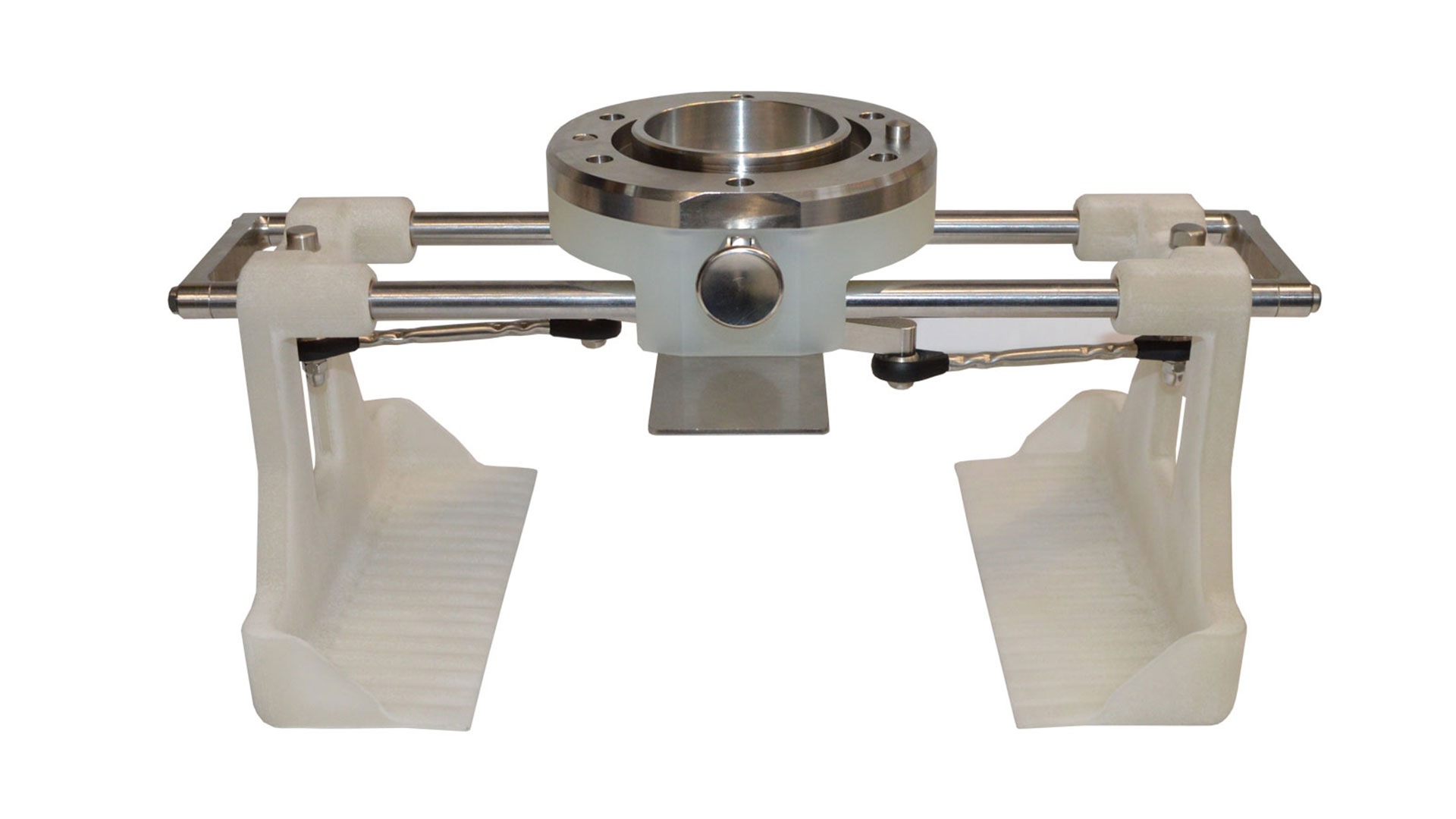
Manipulación de materias primas desde la cinta transportadora hasta el embalaje. Como la pinza en sí no tiene accionamiento propio, se controla mediante un eje giratorio integrado en el Flexpicker.
Solución
La solución reside en un diseño de los componentes compatible con los alimentos. Además, se creó una interfaz directa del eje giratorio del robot con la cinemática de la pinza.
Aspectos destacados y datos técnicos
 Accionamiento del servomotor de CA
Accionamiento del servomotor de CA Agarre exterior
Agarre exterior
Datos técnicos
| Tipo de accionamiento | eléctrica |
| Concepto de agarre | FORM |
| Carrera máx. | 177 [mm] |
| Peso del sistema | 2.5 [kg] |