Mécanisme anti-collision
Série CRR

- Sensibilité de déclenchement ajustable
Grâce à la commande de la pression d’air, vous pouvez ajuster parfaitement la sensibilité à votre application. - Capteurs intégrés
En cas de collision, le capteur intégré envoie un signal à la commande pour déclencher un arrêt d’urgence. - Retour automatique en position initiale
Après un arrêt d’urgence, vous pouvez réinitialiser le mécanisme anti-collision à une distance sûre. Cela représente surtout un avantage lorsque l’accès à l’installation n’est pas souhaité, ou lorsqu’il n’est pas sûr, ou lorsqu’il n’est que difficilement possible.
Taille d’installation: CRR40 | ||||
| N° de commande | Bride de raccordement pour EN ISO 9409-1 | Déviation axe Z | Précision de répétition axiale +/- | |
|---|---|---|---|---|
| CRR40N-A | TK 40 | 8 [mm] | 0.01 [mm] | |
Taille d’installation: CRR50 | ||||
| N° de commande | Bride de raccordement pour EN ISO 9409-1 | Déviation axe Z | Précision de répétition axiale +/- | |
| CRR50N-A | TK 50 | 12 [mm] | 0.01 [mm] | |
Taille d’installation: CRR63 | ||||
| N° de commande | Bride de raccordement pour EN ISO 9409-1 | Déviation axe Z | Précision de répétition axiale +/- | |
| CRR63N-A | TK 63 | 15 [mm] | 0.01 [mm] | |
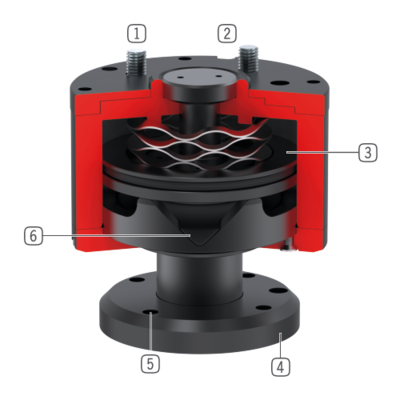
- Bride de raccordement au robot
diamètre et usinage aux normes EN ISO 9409-1 - Détection du piston
le capteur génère un signal de détection de surcharge capteur magnétique fourni - Entraînement
vérin simple effet pneumatique seuil de déclenchement réglable via la pression de service avec ressort intégré - Détection de surcharge
dans la direction Z basculement à l’horizontale torsion autour de l’axe Z - Bride de raccordement
diamètre et usinage aux normes EN ISO 9409-1 - Retour en position initiale
la bride de raccordement est amenée dans sa position initiale au moyen d’un piston