CRR40N-A

기술 데이터
| EN ISO 9409-1 기준 연결 플랜지 | TK 40 |
| Z 축 전향 | 8 [mm] |
| 반복정밀도 축방향 +/- | 0.01 [mm] |
| 축 응답성 | 0.5 [mm] |
| 전향장치 수평 +/- | 14.0 [°] |
| 반복정밀도 반경방향 +/- | 4 [min] |
| 방사형 응답성 | 1.5 [°] |
| Z축 회전 | 21 [°] |
| 회전 반복성 +/- | 4 [min] |
| 회전 응답성 | 1 [°] |
| 작동 압력 | 0.5 ... 6 [bar] |
| 정격 작동 압력 | 6 [bar] |
| 작동 온도 | 5 ... +80 [°C] |
| 사이클 당 실린더 부피 | 14.60 [cm³] |
| Z축 주위의 질량 관성 모멘트 | 2.64 [kgcm²] |
| 무게 | 0.61 [kg] |




장점 세부 정보
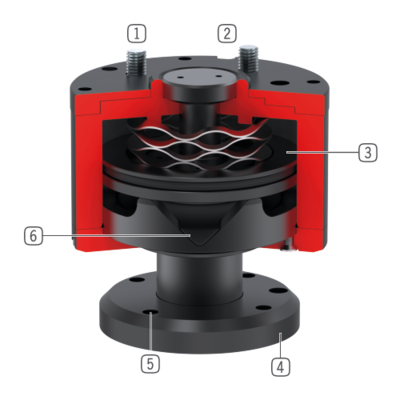
- 로봇 연결 플랜지
EN ISO 9409-1 부품회로 - 피스톤 위치 문의
센서가 과부하 검출을 위해 평가할 수 있는 신호를 생성함 마그네틱 센서가 공급 사양에 포함 - 구동
단동 공압 실린더 작동압력으로 조정가능한 반응 민감도 내장된 스프링으로 - 과부하 감지
Z 방향 수평 방향으로 틸팅 Z 축으로 회전 - 연결 플랜지
EN ISO 9409-1 부품회로 - 재설정
피스톤을 통해 연결 플랜지가 시작 위치로 이동함